
Chenghao Qian

About me
I am currently pursuing a Ph.D. at Virtuocity, and a visiting researcher at the University of Cambridge. I completed my master's degree at the University of Sydney and had industrial experience working in the fields of robotics and autonomous driving.
build systems that 👁️ perceive, 🧠 reason, and 🤖 act safely in the real world.
Experience
Research Interests
- 3D & Video World Models
- Physics-guided Generation
- Inverse Modelling
- Robust Perception
I am open to research collaborations. Please feel free to contact me at tscq@leeds.ac.uk.
News
| [04/2026] | I gave a talk at the University of Cambridge. |
|---|---|
| [02/2026] | I’m co-organizing CVPR 2026 LoViF Workshop. Please join us! |
| [11/2025] | One paper got accepted by AAAI 2026! |
| [10/2025] | Presented our paper at IROS 2025! |
| [09/2025] | One paper got accepted by ICCV Workshop on Generating Digital Twins from Images and Videos. |
| [03/2025] | I gave a talk at the Institute for Safe Autonomy, University of York. |
| [03/2025] | Invited by Auto-Driving Heart to give a livestream talk. |
| [03/2025] | One paper accepted to IEEE RA-L. |
| [01/2025] | One paper got accepted by IEEE ICRA 2025. |
| [12/2024] | AllWeatherNet received the 🌟Overall Best Student Paper Award (1 out of 2106) at ICPR 2024. |
Publications
2026
- RoboSoft
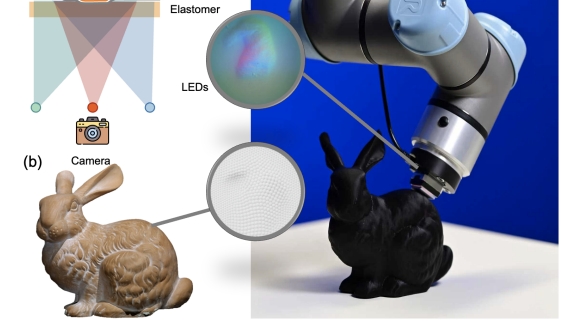 Reduced-order Neural Modeling with Differentiable Simulation for High-Detail Tactile Perception2026
Reduced-order Neural Modeling with Differentiable Simulation for High-Detail Tactile Perception2026 - AAAI



2025
- ICCV-W

- ICRA
 3D Scene Reconstruction in Adverse Weather Conditions via Gaussian SplattingIEEE International Conference on Robotics and Automation, 2025
3D Scene Reconstruction in Adverse Weather Conditions via Gaussian SplattingIEEE International Conference on Robotics and Automation, 2025 - RA-L
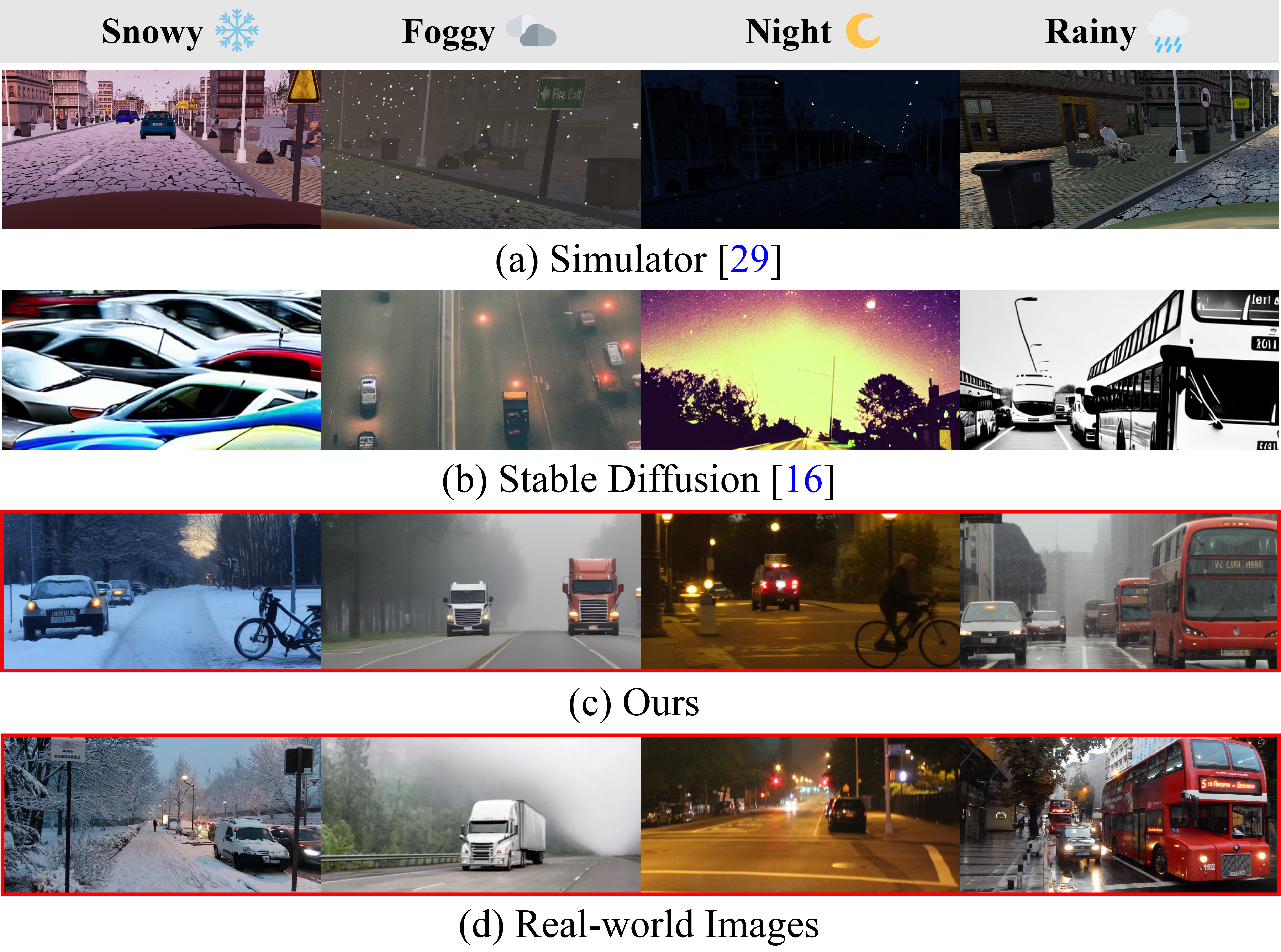 LLM-assisted procedural weather generation for domain-generalized semantic segmentationIEEE Robotics and Automation Letters, 2025
LLM-assisted procedural weather generation for domain-generalized semantic segmentationIEEE Robotics and Automation Letters, 2025



2024
- ICPR
 🌟 Best Paper Award (1/2106): Unified Image Enhancement for Autonomous Driving Under Adverse Weather and Low-Light ConditionsIn International Conference on Pattern Recognition, 2024
🌟 Best Paper Award (1/2106): Unified Image Enhancement for Autonomous Driving Under Adverse Weather and Low-Light ConditionsIn International Conference on Pattern Recognition, 2024

Services
Reviewer
Conference/Workshop:
- IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
- Annual Conference on Neural Information Processing Systems (NeurIPS)
- European Conference on Computer Vision (ECCV)
- ACM SIGGRAPH Asia (SIGGRAPH Asia)
- AAAI Conference on Artificial Intelligence (AAAI)
- IEEE International Conference on Robotics and Automation (ICRA)
- International Conference on Pattern Recognition (ICPR)
- Embodied World Models for Decision Making (NeurIPS Workshop)
- Generating Digital Twins from Images and Videos (ICCV Workshop)
Journal:
- International Journal of Computer Vision (IJCV)
- IEEE Transactions on Visualization and Computer Graphics (TVCG)
Organizer/Co-organizer
1st Workshop on Low-Level Vision Frontiers (@CVPR 2026)
Mentorship
Qiangbo Zhang, Driving Scene Simulation, University of Science and Technology of China
Yanpu Wang, 3D Scene Understanding, Hefei University of Technology
Lele Hu, Domain Generalization, Hefei University of Technology
Tutor
COMP3631 Intelligent Systems and Robotics, University of Leeds
COMP2811 User Interface, University of Leeds